Ananth Rachakonda

Hi there! I work at the intersection of generative methods and deep RL to build physically aware robots. My previous works are themed in theory of MDPs, deep (reinforcement) learning, dynamics modeling, nonlinear planning, and safe controls.
When I am not working, you can find me watercolor painting ![]() , cooking
, cooking ![]() , or swimming in a nearby pool
, or swimming in a nearby pool ![]() . I like hikes
. I like hikes ![]() and bike rides
and bike rides ![]() . I enjoy listening to all genres of music and am a trained carnatic flautist
. I enjoy listening to all genres of music and am a trained carnatic flautist ![]() .
.
news
| Mar 11, 2024 | Giving lectures on MuJoCo for learning on drones as part of the MTP on UAV and allied systems at RRC, IIIT Hyderabad. |
|---|---|
| Jan 4, 2024 | TA for the EC4.501 ARC course. |
| Aug 14, 2023 | Invited for lectures in “MuJoCo for Contact Rich Learning of Bipedal Locomotion”, between 27th, September & 14th, October at Qualcomm Research, Bengaluru. |
| Aug 7, 2023 | Presenting a paper at IEEE CDC, 2023. |
selected publications
2024
-
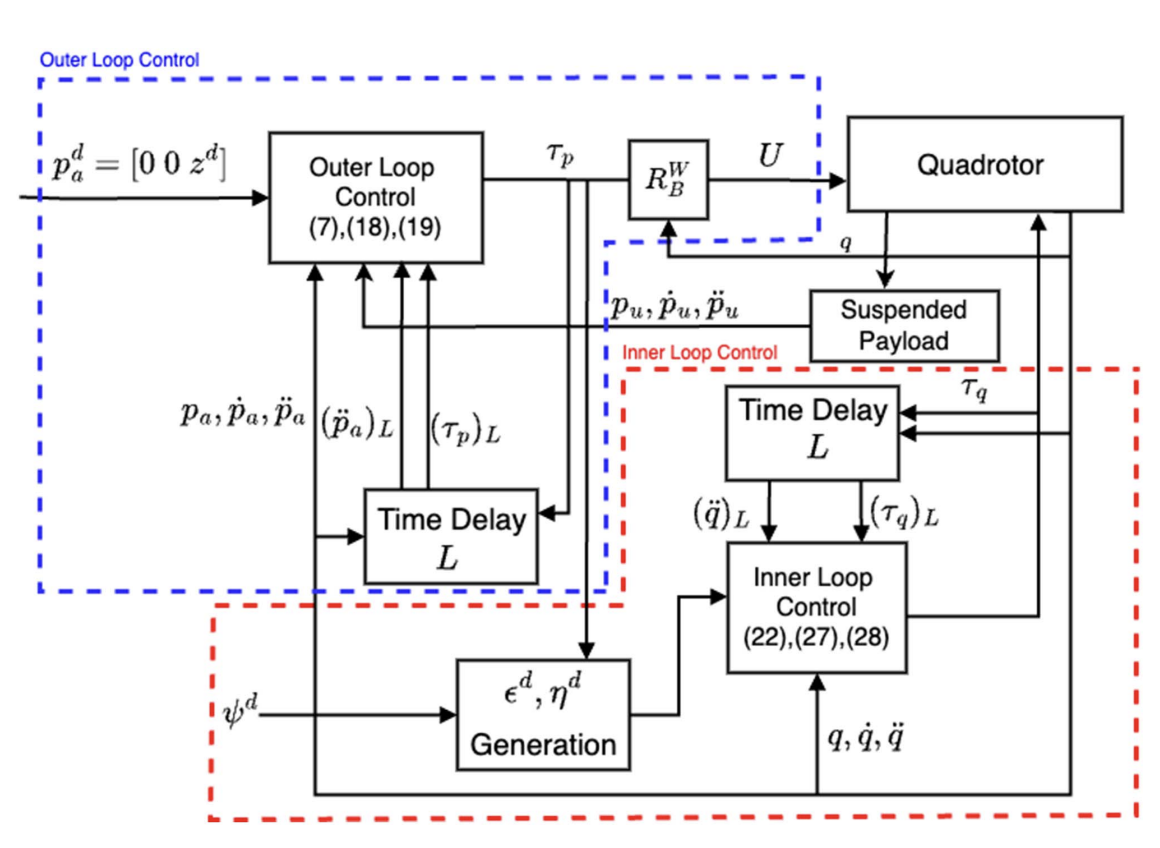 Adaptive Tracking and Anti-Swing Control of Quadrotors Carrying Suspended Payload Under State-Dependent UncertaintyIEEE/ASME Transactions on Mechatronics, 2024
Adaptive Tracking and Anti-Swing Control of Quadrotors Carrying Suspended Payload Under State-Dependent UncertaintyIEEE/ASME Transactions on Mechatronics, 2024
2023
-
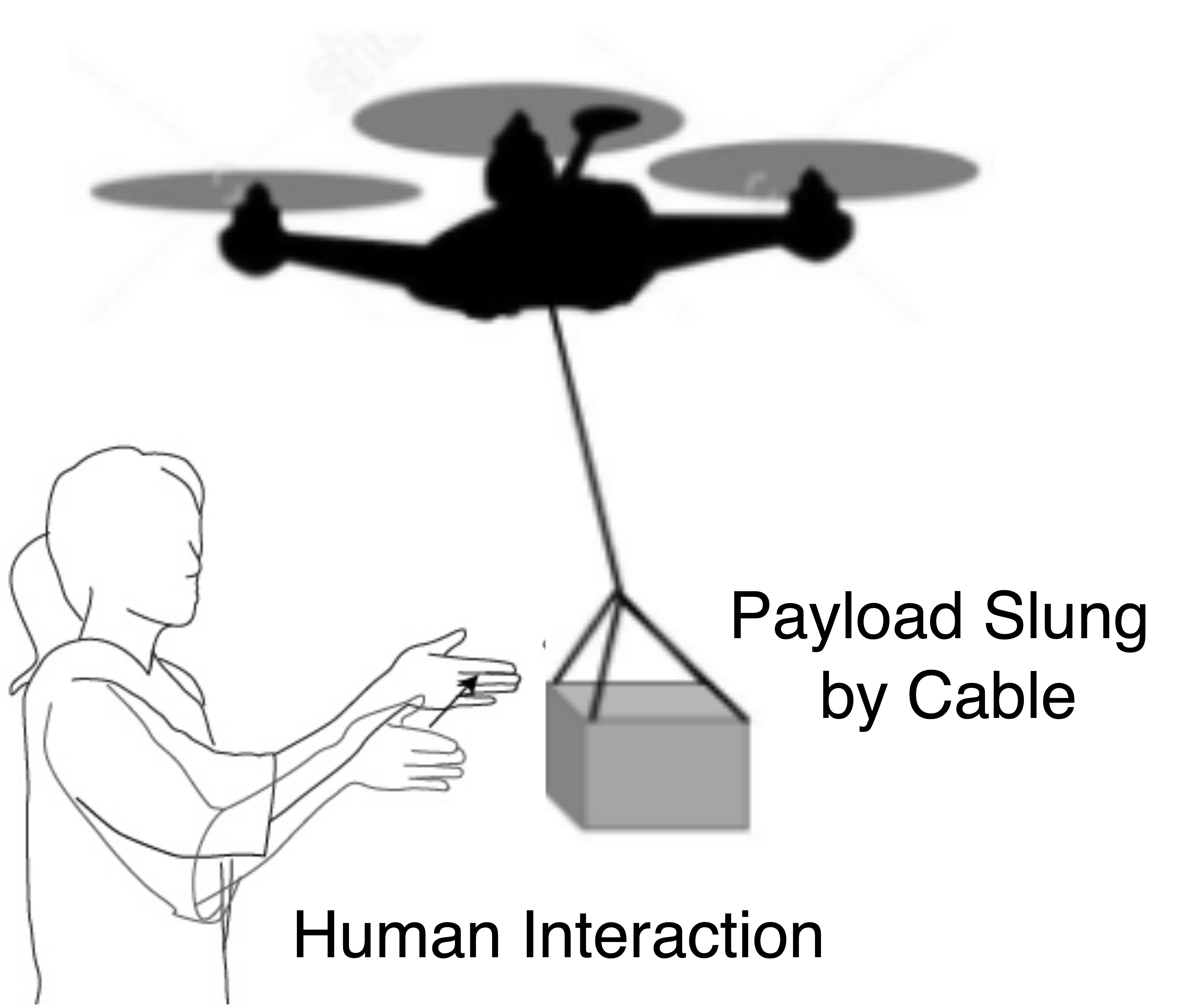 Adaptive Anti-swing Control for Clasping Operations in Quadrotors with Cable-suspended PayloadIn 2023 IEEE 62nd Conference on Decision and Control (CDC), 2023* indicates authors have contributed equally
Adaptive Anti-swing Control for Clasping Operations in Quadrotors with Cable-suspended PayloadIn 2023 IEEE 62nd Conference on Decision and Control (CDC), 2023* indicates authors have contributed equally
2022
-
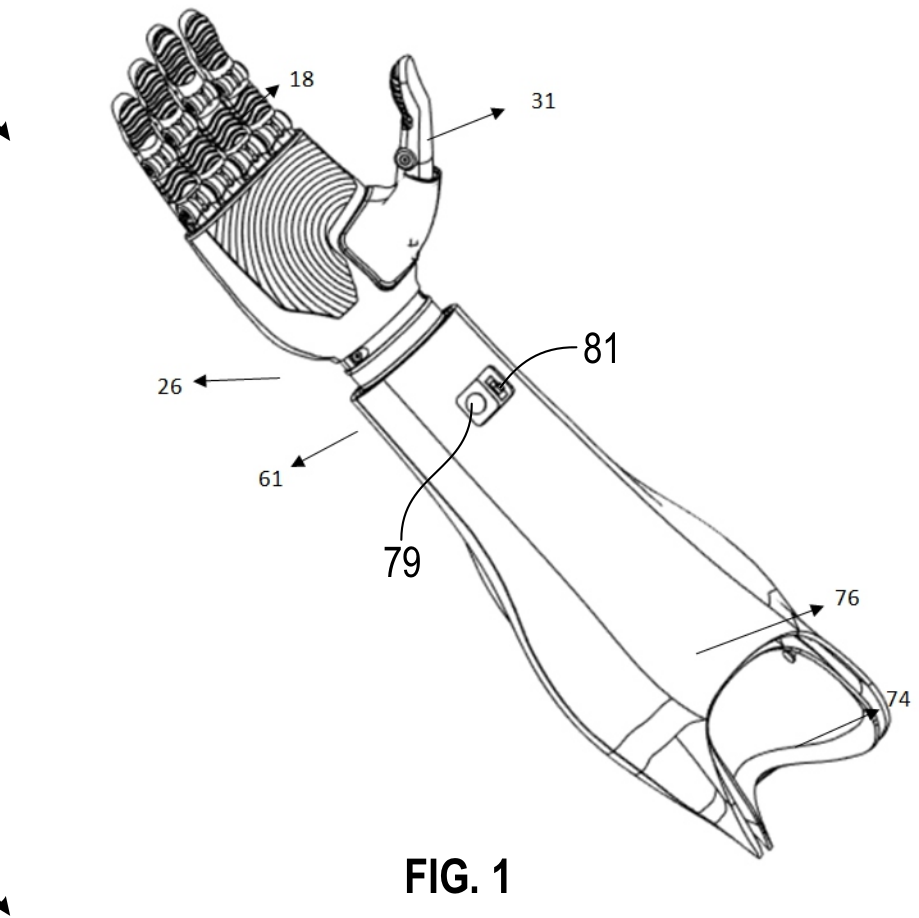 A Fully Functional Bionic ArmJun 2022Granted by IP India, Office of the CGPDTM, Dept. of Ind. Policy and Promo., Ministry of Commerce and Industry, Govt. of India
A Fully Functional Bionic ArmJun 2022Granted by IP India, Office of the CGPDTM, Dept. of Ind. Policy and Promo., Ministry of Commerce and Industry, Govt. of India